
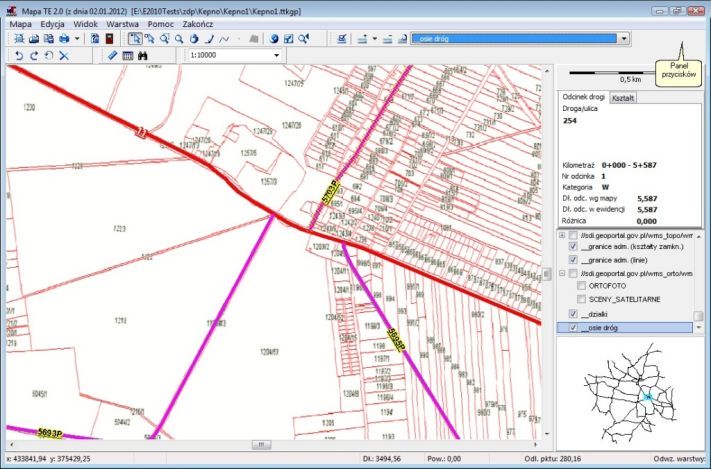
Program Mapa TE 2 umożliwia tworzenie i obsługę map utworzonych z warstw wektorowych oraz rastrowych.
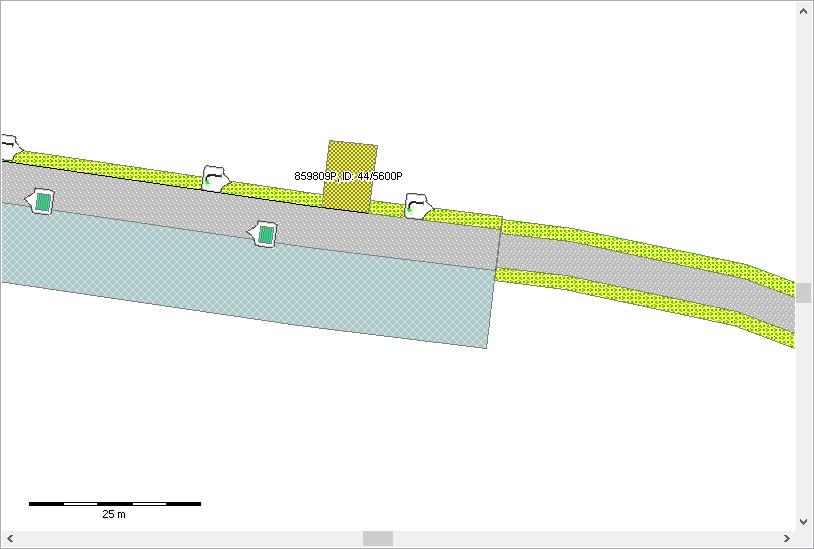
Głównym celem programu Mapa TE 2 jest utworzenie mapy techniczno-eksploatacyjnej, do wykonania której są zobowiązani zarządcy dróg. Dane ewidencyjne pobierane są bezpośrednio z bazy danych systemu EWIDR 2010. Mapa może służyć także innym celom: wydrukom przydatnym w bieżącym zarządzaniu drogami, identyfikacji działek drogowych, prezentacji warstw nawierzchni i innych elementów pasa drogowego.
Za pomocą Mapa TE 2 użytkownik może utworzyć wiele map swojej sieci dróg. W praktyce może się okazać, iż wystarczy jedna mapa z wieloma warstwami włączanymi do różnych celów.
Mapę tworzą
1. Plik projektu
Jest to plik w formacie systemu TatukGIS o rozszerzeniu TTKGP. Zawiera informacje o warstwach mapy i ich właściwościach
2. Pliki danych warstw projektu
Pliki wektorowe w formatach SHP, DXF i inne, pliki rastrowe TIFF, BMP, JPG. Warstwy WMS nie mają swoich plików, gdyż są pobierane z serwerów map – natomiast właściwości ich wyświetlania są zapamiętywane w pliku projektu.
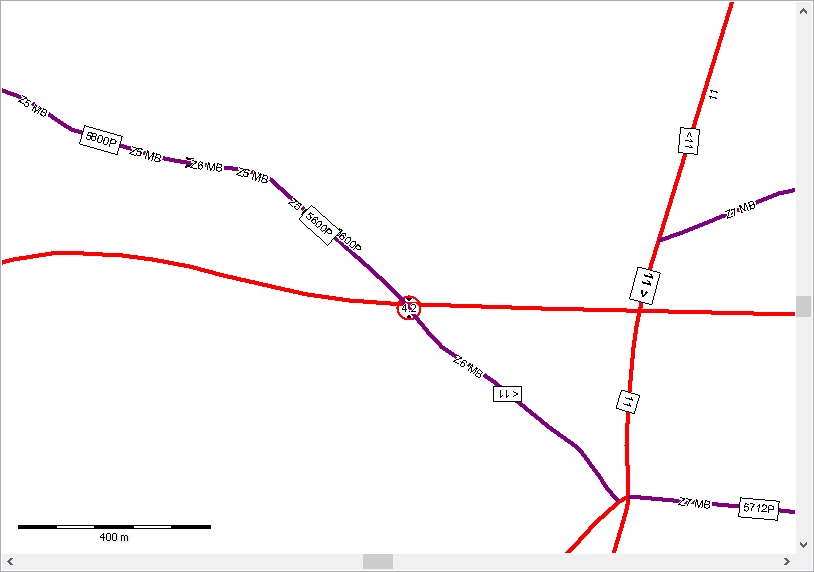
Działanie programu oparte jest na tworzeniu w projekcie mapy warstw z obiektami reprezentującymi elementy dróg i ich otoczenia. Podstawową i najważniejszą warstwą jest warstwa osi dróg. Po połączeniu odcinków graficznych tej warstwy z odcinkami ewidencyjnymi w bazie danych pozostałe warstwy tematyczne tworzone są automatycznie na podstawie danych w ewidencji. Użytkownik może sam wykonać warstwę osi dróg na podstawie np. warstwy rastrowej, albo dołączyć istniejącą już warstwę wektorową. Dość istotne jest, aby warstwę osi dróg utworzyć/dodać podczas tworzenia nowej mapy, ponieważ program dodaje do struktury warstwy specyficzne dla swojego działania pola.
Osie drogi utworzone na mapie można (a nawet należy) połączyć z odpowiednimi odcinkami ewidencyjnymi w programie EWIDR 2010. Dzięki temu zyskuje się możliwość:
1. Utworzenia warstw z danymi techninczno-eksploatacyjnymi, wymaganymi przez rozporządzenie
2. Utworzenie warstw z danymi z Opisów linowych (osobne warstwy dla każdego rodzaju zdarzenia)
Dzięki dodatkowym funkcjom, program MapaTE 2 umożliwia tworzenie ewidencji na podstawie obiektów (osi dróg) na mapie wektorowej. Użytkownik może utworzyć nowe odcinki ewidencyjne z długością odczytaną z mapy i ewentualni z innymi danymi zawartymi w obiekcie osi (właściwości kształtu).
Moduł MapaTE2 potrafi także pobrać dane o ocenach jezni i ciągów komunikacyjnych z programu OST 2010 i na tej podstawie utworzyć mapę uszkodzeń wymaganą przez instrukcję, na której oparty jest program OST2010.
- system XP Professional, Vista, 7, 8 (wersja desktop)
- procesor klasy Pentium o szybkości min. 1 GHz
- 60 MB wolnego miejsca na dysku
- zalecana rozdzielczość min. 1024×768
- zainstalowane środowisko Firebird 2.1 (dostarczane z programem)
Moduł MapaTE2 jest używany przez:
- PZD Kępno
- UM Barcin
- ZDP Włodawa
- UG Bogoria
- UG Osięciny